
طراحی ربات با الهام از عنکبوت+فیلم
به گزارش «نبض فناوری»، عنکبوت ها اغلب در زمینه رباتیک الهام بخش هستند؛ به ویژه از آنجا که آنها هنگام شکار طعمه اندام خود را از طریق مکانیزم های هیدرولیکی حرکت می دهند بنابراین دانشمندان سعی می کنند آن را در ربات ها پیاده سازی کنند.
تیم دانشمندان با استفاده از این اصول، توانستند رباتهای مفصلی را بدون هیچ گونه اجزای بزرگ و اتصالات هدایت کنند، که به شما کمک می کند تا از وزن آنها جلوگیری کرده و قابلیت حمل و سرعت آنها افزایش یابد.
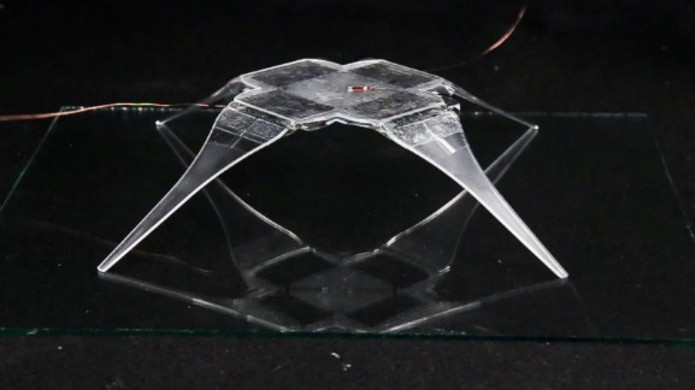
این ربات به دلیل ساختارهای ساده سبک در ساخت خود می تواند 10 برابر ارتفاع خود بپرد.
یافته این تحقیق جزئیات یک مفصل دو طرفه، یک اندام مصنوعی چند بخشی و یک چنگک سه انگشتی است که می تواند برای گرفتن و برداشتن اشیا استفاده شود. آنها سبک، ساده و دارای عملکرد بالایی هستند، به این معنی که برای سیستم های رباتیک که به حرکت سریع احتیاج دارند مفید هستند.
مفاصل SES مبتنی بر فناوری HASEL قبلاً توسط این تیم برای ساخت عضلات مصنوعی ابداع شده بود. اتصالات SES از مکانیزم اسکلت بیرونی تقلید می کند که دارای عناصر سفت و سخت و نرم است، شبیه روشی که عنکبوت از طریق نیروهای هیدرولیکی پاهای خود را گسترش می دهد.
کیسه به یک اتصال دوار متصل می شود و هنگامی که ولتاژ زیادی بین الکترودها اعمال شود، دی الکتریک مایع در داخل کیسه جابجا می شود و مفصل خم می شود. اتصالات این ربات می توانند تا 70 درجه بچرخند، که منجر به گشتاور بالا می شود و آنها می توانند خیلی راحت به حالت اولیه برگردند.
کریستوف کپلینگر مدیر بخش مواد رباتیک در موسسه سیستم های اطلاعاتی ماکس پلانک گفت: اتصالات این ربات بسیار ساده و سبک هستند، زیرا هیچ اجزای جانبی آن را سنگین نمی کند. ساخت آنها آسان و ارزان است. اینها همه ویژگی هایی هستند که برای طراحی روبات ها بسیار مهم هستند.
دانشمندان تطبیق پذیری اتصالات SES را با استفاده از گیرنده سه انگشتی نشان دادند. با اتصالات SES به عنوان لولا، فضای بسیار کمتری مورد نیاز است.
این تحقیقات برجسته است زیرا ما می توانیم از طیف گسترده ای از مواد، (حتی پلاستیک) برای ساخت کیسه های تراشه استفاده کنیم. به این ترتیب ما می توانیم SES را در طیف گسترده ای از هندسه ها با ویژگی های خاص محرک تنظیم شده پیاده سازی کنیم.
محققان اعلام کردند که هدف نهایی تحقیق آن ها ساخت ربات عنکبوتی نبود بلکه آن ها می خواستند یک مفصل پیشرفته و فعال تولید و در هر رباتی استفاده کنند. نتایج این تحقیق در Advanced Science منتشر شد.





















